1.はじめに
WRO JAPAN ミドル競技は、WRO RoboMissionのエキスパート競技につなぐ競技であり、ロボットを作るために大事な基本技術(ラインの検知、ライントレース、色の判断、オブジェクトの運搬など)を取り入れ、ロボット製作の中級者を対象とした競技になっています。小学生、中学生が、同じフィールドでロボットの製作やプログラム制御の基礎技術を確認する内容になっています。
2.競技フィールド
- 競技フィールドは,外寸900×1800mmのサイズで製作する.コースの周りには壁はない。
- WRO Japan 群馬予選大会では、競技フィールドはシート素材のスタンダードターポリンを利用する。
- WRO Japan 群馬予選大会では、競技コート内の黒ゾーンや黒ラインは(C,M,Y,K)→(0,0,0,100),茶色ラインは(C,M,Y,K)→(40,65,90,35)で印刷している。
- WRO Japan 群馬予選大会では、で利用するカラーシートには中川ケミカル製カッティングシート(赤:137,青:523,黄:311)を使用する.カラーシートのサイズは,50mm×50mm である。
- WRO Japan 群馬予選大会で利用するカラーブロックは WRO ブロックセット(LEGO Education)に含まれるブロックを使用する。
- WRO Japan 群馬予選大会競技コートのシートはテーブルなどの上に乗せ,平坦な場所に設置し,動かないように固定している.ただし,競技コートの段差,うねり,歪み等の誤差±5mm まで許容範囲とする。
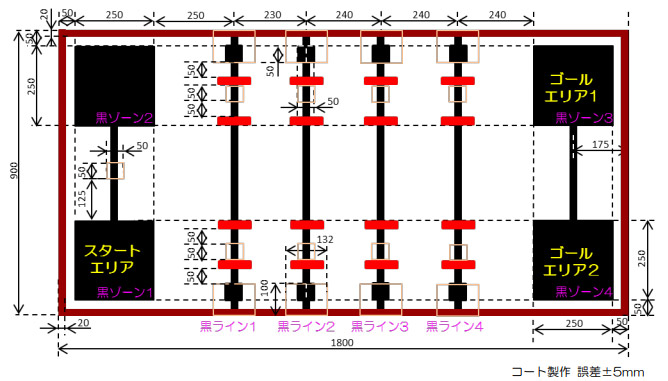
- 競技フィールドのサイズは図1(WRO JAPAN 2022 ミドル フィールド)に示す。 この競技コートは,2023 年から変更する予定です
- 競技コートには,黒ゾーン(1~4),黒ライン(1~4)がある。
- 黒ライン上にある黒い四角から 50mm 離れたところの黒ライン中央に赤色のカラーマーカー(100×20mm)が貼り付けられ,さらに赤いマーカーから 100mm 離れたところの黒ライン中央に赤色のカラーマーカー(100×20mm)が貼り付けてある。
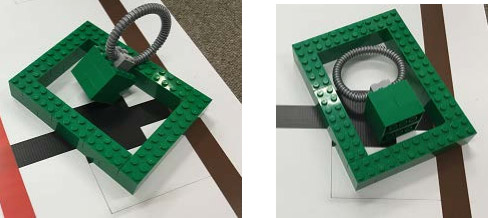
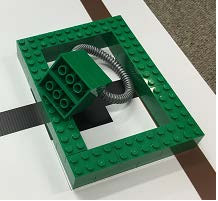
- 図 1 の中の黒ライン上の一方(図中の上または下)のオレンジ色で表されている大きな枠(実際は審判が確認しやすいように鉛筆で記入)の中には図 2 に示すブロック壁,同じ側の赤色のマーカーの間の小さなオレンジ枠には図 3 に示すオブジェクトが設置される.また,反対側の小さなオレンジ枠には,カラーシート(青色または黄色のカッティングシートで作成)が貼られ,その上に図 4に示すカラーブロック(緑色,青色,黄色,赤色のブロックで作成)が設置される.オブジェクトの位置,カラーシートやカラーブロックの位置や色は車検後の抽選によって決められる。
- 図1の中のオレンジ色で表されている枠(実際は審判が確認しやすいように鉛筆で記入)の中には図2に示すブロック壁、もしくは、オレンジ色の枠内の黒色の四角の中に図3に示すオブジェクトが設置される。

course_middle2022

block_middle2022
3.ロボットの規程(RoboMission共通ルールも必ず確認すること)
-
- ロボットは教育用 LEGO MINDSTROMS NXT,EV3 基本セット,SPIKE PRIME,または LEGOMINDSTORMS Robot Inventor セットのいずれか1セットにのみ含まれているパーツで作製すること。ただし,カラーセンサーを Hi-Technic 社製カラーセンサーに置き換えることができる。
- カラーシートはカッティングシートで作り,フィールドに貼付けられているため,その厚みを考えてロボットを作成すること。
- 競技ルール内に記載されている「ロボット本体」とは NXT/EV3 インテリジェントブロック,または,SPIKE/Robot Inventor ハブを指している。
4.ミドル競技ミッション
スタート後に最初のカラーシートの色を読み取り,黒ライン 1 上の一方にあるオブジェクトをブロック壁内に運び入れ,もう一方にあるカラーブロックとカラーシートの色を読み取り,カラーブロックで指定された黒ラインに向かう.同様に,オブジェクトの運び入れとカラーブロックとカラーシートの色の読み取りを順に行い,指定されたゴールへ入る競技です。
- スタートエリアからロボットがスタートする。
- 黒ゾーン 1 と黒ゾーン 2 を結ぶライン上にカラーシート(青または黄)が貼られており,縦の黒ライン 1 のオブジェクトやカラーブロック,カラーシートの位置を表している。
- 黒ライン1~4の一方の側には,順に緑,青,黄,赤の色のブロック壁(図 2)やオブジェクト(図3)が設置される.この順序は変わらない。
- 黒ライン1~4の③の反対側には,抽選で決められたカラーシート(青または黄)が貼り付けられ,その上に抽選で決められたカラーブロック(緑,青,黄,赤)が設置される.抽選は,各ラウンドの車検後に行う。
- 車検後に抽選したカラーシートの色が青色だった場合,カラーブロックで指定された黒ラインの図の下側(黒ゾーン 1 側)の小さなオレンジ枠(50×50mm)内に図 3 のようなオブジェクトを設置し,大きなオレンジ枠内に図 2 のようなブロック壁を設置する。
- 車検後に抽選したカラーシートの色が黄色だった場合,カラーブロックで指定された黒ラインの図の上側(黒ゾーン 2 側)の小さなオレンジ枠(50×50mm)内に図 3 のようなオブジェクトを設置し,大きなオレンジ枠内に図 2 のようなブロック壁を設置する。
- カラーシートが青や黄色の場合,カラーブロックで指定された黒ライン上にあるオブジェクトを同じ黒ライン上にあるブロック壁の中に運び入れる
- 黒ライン 1~4 のカラーシートの上には抽選で決められたカラーブロックが設置される.このカラーブロックの色は,次にオブジェクトをブロック壁に運び入れる黒ラインの位置を表している.ただし,カラーブロックが緑だった場合,ゴールへ向かうことを表している。
- ゴールの位置は,緑のカラーブロックの下のカラーシートの色によって指定される.カラーシートが青だった場合はゴールエリア 2,黄色だった場合はゴールエリア 1 がゴールすべきエリアとなる。
- チームは,それぞれのオブジェクトやブロック壁は,底面全体が競技コートに接していて,指定された範囲内であれば,どのように置いてもかまわない.また,オブジェクトのチューブの向きや角度も自由で良い。
- ロボット本体(NXT,EV3 インテリジェントブロック,またはハブ)が完全に指定されたゴールエリアに入り,かつ,すべてのモータが静止したことを審判が宣言したとき,ミッションは終了とする。ここで,完全にとは,競技コートを真上から見たとき,ロボット本体がゴールエリアの内側に入っていることを指す。
- 競技と競技時間は,次の場合に終了する
A) 選手が「ストップ」と大きな声で宣言し,ロボットが完全に停止(どのモータも動いていない)したとき
B) スタート後、選手がロボットやフィールド、フィールド上のオブジェクトなどに触れたとき
C) 競技時間が2分を超えたとき
D) ロボット本体がフィールドの外側に完全に出てしまったとき(ロボットの上部から見て確認)
E) ロボットがフィールド内に復帰できなくなったとき
F) このルールブックや共通ルールブックで説明している内容に違反したときき(違反した内容により,エキシビジョン,失格となる)
5.抽選方法とレイアウト例
5.1 抽選方法
・カラーブロック(緑,青,黄,赤) ・・・ 次に進むラインが決まる
・カラーシート(青,黄) ・・・ 次に進むラインのオブジェクトの位置(上,下)が決まる
カラーブロックとカラーシートの色の抽選は,各ラウンドの車検終了後に,次のように行う.
① 黒ゾーン 1 と黒ゾーン 2 を結ぶライン上のカラーシートの色を青または黄の 2 色から抽選する.これにより,黒ライン 1 のオブジェクトとブロック壁の配置が決定する。
② 黒ライン 1 の次に進むべきラインを示すカラーブロックを青,黄,赤の 3 色から抽選する.次にオブジェクトとブロック壁の位置を示すカラーシートの色を青または黄の 2 色から抽選する.これにより,2 番目に進む黒ラインの位置とその黒ライン上のオブジェクトとブロック壁の位置が決定する。
③ ②の次に進むべきラインを示すカラーブロックを②で抽選された色を除いた 2 色から抽選する.次にオブジェクトとブロック壁の位置を示すカラーシートの色を青または黄の 2 色から抽選する.これにより,3 番目に進む黒ラインの位置とその黒ライン上のオブジェクトとブロック壁の位置が決定する。
④ ③の次に進むべきラインを示すカラーブロックは②,③で抽選された色を除いた色となる.次にオブジェクトとブロック壁の位置を示すカラーシートの色を青または黄の 2 色から抽選する.これにより,4 番目に進む黒ラインの位置とその黒ライン上のオブジェクトとブロック壁の位置が決定する。
⑤ 4 番目に配置するオブジェクトとブロック壁の位置を示すカラーシートの色を青または黄の 2 色から抽選する.4 番目に配置するカラーブロックは緑となる.これにより,ゴールの位置が決定する。
5.2 抽選とレイアウト例
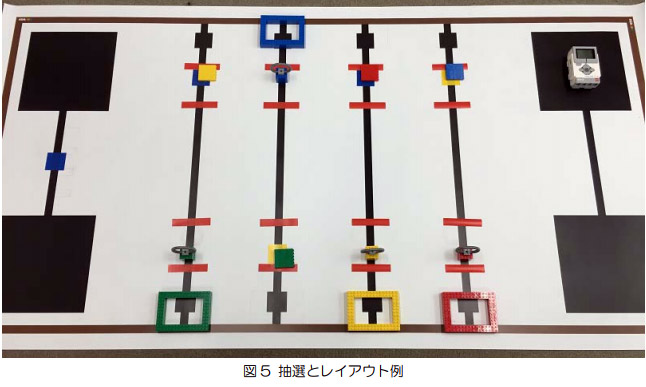
5.1 の①から順に抽選した例とそのときのレイアウト例を図 5 に示す.なお,図 5 ではカラーシートの色が分かりやすいようにカラーブロックを少しずらして配置している。
(1) ①で抽選した結果が青であった.これにより,黒ゾーン 1 と黒ゾーン 2 を結ぶライン上に青のカラーシートが貼り付けられる.また,緑のオブジェクトとブロック壁が黒ライン 1 の下側に設置される。
(2) ②の抽選でカラーブロックが黄色,カラーシートが青であった.これにより,黒ライン 1 の上側に青のカラーシートが貼り付けられ,その上に黄色のカラーブロックが設置される.また,黄色のオブジェクトとブロック壁が黒ライン 3 の下側に設置される。
(3) ③の抽選でカラーブロックが赤,カラーシートが青であった.これにより,黒ライン 3 の上側に青のカラーシートが貼り付けられ,その上に赤のカラーブロックが設置される.また,赤のオブジェクトとブロック壁が黒ライン 4 の下側に設置される。
(4) ④で残りのカラーブロックが青,抽選でカラーシートが黄色であった.これにより,黒ライン 4 の上側に黄色のカラーシートが貼り付けられ,その上に青のカラーブロックが設置される.また,青のオブジェクトとブロック壁が黒ライン 2 の上側に設置される。
(5) ⑤の抽選でカラーシートが黄色であった.これにより,黒ライン 2 の下側に黄色のカラーシートが貼り付けられ,その上に緑のカラーブロックが設置される.この結果,ゴールはゴールエリア 1 となる(図 5 の LEGO MINDSTORMS EV3 の本体の位置)。
ミドル競技レイアウト例
6.ポイント
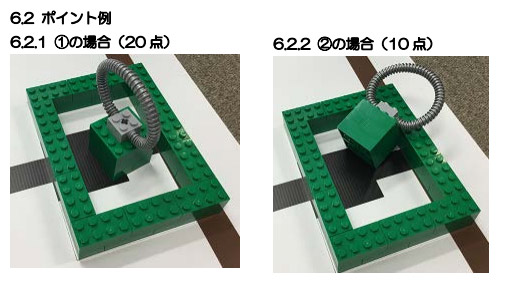
| ポイント1.オブジェクトが壊れず,指定されたエリアに完全(オブジェクトがブロック壁の中にあり,オブジェクトの底面全体がブロック壁内の競技コートに接触している)に入っている。 | 各20点 |
| ポイント2.オブジェクトが壊れず,指定されたエリアに完全ではないが入っている(オブジェクトがブロック壁の中にあり,オブジェクトの底面の一部がブロック壁内の競技コートに接している) | 各10点 |
| ポイント3.ロボット本体全体が指定されたゴールエリアに入り,すべてのモータが静止している(少なくとも①,②いずれかのポイントが取れている場合のみ 与えられる) | 20点 |
| ポイント4.【ボーナス】正しい順にオブジェクトを入れることができた(①,②いずれかのポイントがすべて取れている場合のみ与えられる) | 10点 |
| ポイント5. サプライズルール(大会当日の朝に発表) |
20点 |
| ポイント6.ブロック壁が壊れた,または,ブロック壁が枠からはみ出した。 | 各-5点 |
| 満点 | 130点 |
6.2 ポイント例
6.2.3 ①と⑥の場合(15 点)
オブジェクトがブロック壁の中にあり,底面全体が競技コートに接しているが,ブロック壁がずれてしまった。
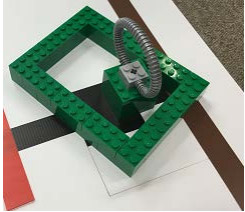
6.2.4 ②と⑥の場合(5 点)
オブジェクトがブロック壁の中にあり,底面の一部が競技コートに接しているが,ブロック壁がずれてしまった。
6.2.5 ①,②以外の場合(0 点)
オブジェクトの底面が競技コートに触れていない。
7.スピードの計算方法
2022 年のミドル競技では,オブジェクトを入れる順によって,ミッションをクリアするまでの時間が変わる.そこで,ポイントで同点だった場合は,ミッションをクリアするスピードによって順位を決定する(レギュラーカテゴリ共通ルールに記載).そのスピードは,次式により計算する.
(スピード)[mm/秒] = (基準走行距離)[mm] ÷ (ミッションクリア時間)[秒]ここで,ミッションクリア時間は 1/10 秒までを利用し,基準走行距離[mm]は,次の表の通りとする.各黒ライン上の走行距離は,オブジェクトを入れるための走行距離とカラーシートとカラーブロックを読むために走行する距離の往復距離で 1,120[mm]としている。
| オブジェクトを入れる順 | 基準走行距離[mm] | |
| 1 | 黒ライン 1 → 黒ライン 2 → 黒ライン 3 → 黒ライン 4 → ゴール | 6,230 |
| 2 | 黒ライン 1 → 黒ライン 2 → 黒ライン 4 → 黒ライン 3 → ゴール | 6,710 |
| 3 | 黒ライン 1 → 黒ライン 3 → 黒ライン 2 → 黒ライン 4 → ゴール | 6,710 |
| 4 | 黒ライン 1 → 黒ライン 3 → 黒ライン 4 → 黒ライン 2 → ゴール | 7,190 |
| 5 | 黒ライン 1 → 黒ライン 4 → 黒ライン 2 → 黒ライン 3 → ゴール | 7,190 |
| 6 | 黒ライン 1 → 黒ライン 4 → 黒ライン 3 → 黒ライン 2 → ゴール | 7,190 |
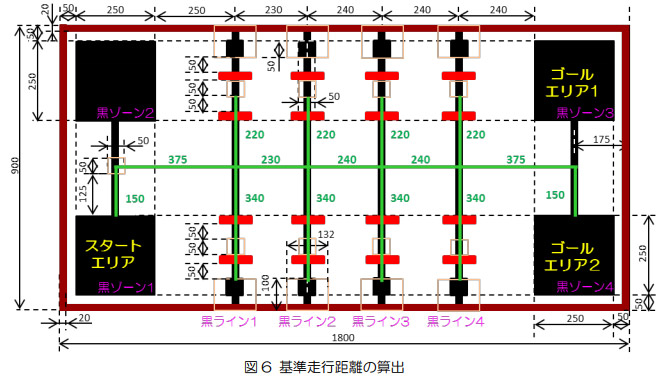
図 6 基準走行距離の算出
8.その他
8.1 オブジェクトの作り方
① 2×4 ブロックを 2 個ずつ交差するように 3 段積み上げる。
② 灰色ブロックとチューブを接続し,①の中央に付ける。
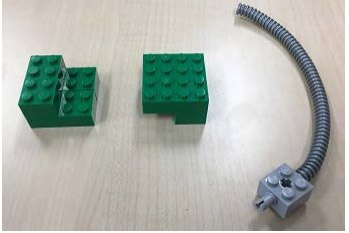
図 7 オブジェクトの作り方
8.2 ブロック壁の作り方
① 2×4 ブロックを 1 段目と 2 段目で 2×2 ポッチずらして付ける。

図 8 ブロック壁の作り方
8.3 カラーブロックの作り方
① 1×6 ブロックを 5 個付ける。

図 9 カラーブロックの作り方